
Ricercatori a Università Bruna hanno mosso i primi passi verso la creazione di una rete di robot autonomi interconnessi che imitano il comportamento di nuoto del krill per navigare nelle oscure profondità dell’oceano. In uno studio pubblicato su Scientific Reports, il team introduce Pleobot una piccola piattaforma Robotica progettata per emulare il metodo di nuoto metacronale impiegato da krill.
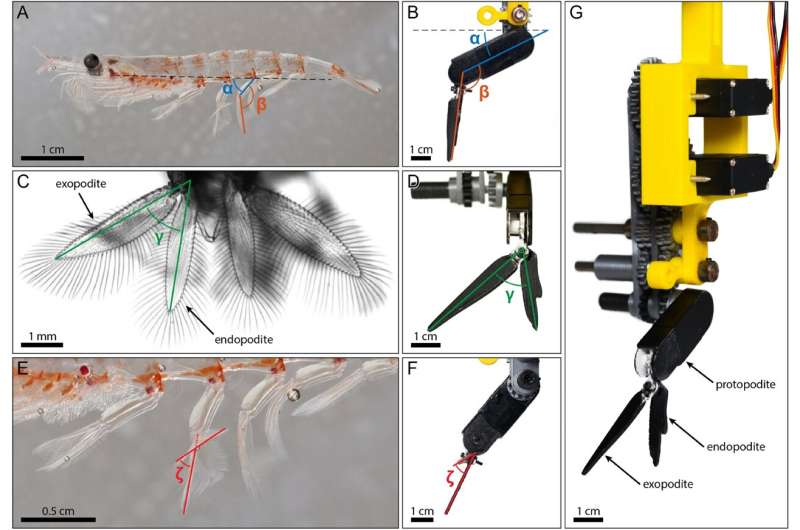
Questa piattaforma innovativa non solo aiuta a comprendere l’intricata tecnica di nuoto di queste straordinarie creature acquatiche, ma funge anche da base per lo sviluppo di robot subacquei agili e manovrabili. Pleobot, attualmente composto da tre sezioni articolate, replica i precisi movimenti del krill durante il nuoto metacronale.
Traendo ispirazione dalle straordinarie capacità di nuoto del krill, che comprendono accelerazione, frenata e virata, i ricercatori mostrano le capacità di Pleobot nell’emulare i movimenti delle gambe del krill che nuota. Lo studio offre nuove informazioni sulle interazioni fluido-struttura necessarie per sostenere un nuoto stabile in avanti in questi affascinanti organismi.
Il potenziale impatto di Pleobot va oltre il regno della curiosità scientifica: mantiene la promessa di sfruttare oltre 100 milioni di anni di perfezione evolutiva per progettare robot più efficienti ed efficaci per la navigazione oceanica. “Gli esperimenti che coinvolgono organismi sono intrinsecamente impegnativi e imprevedibili”, spiega Sara Oliveira Santos, l’autore principale dello studio e un dottorato di ricerca. candidato presso la Facoltà di Ingegneria di Brown.
“Pleobot ci fornisce un livello di risoluzione e controllo senza precedenti, consentendo indagini complete sugli aspetti del nuoto simile ai krill che contribuiscono alla loro eccezionale manovrabilità sott’acqua. Abbiamo mirato a progettare uno strumento completo per comprendere il nuoto simile al krill, che comprenda tutti i dettagli intricati che rendono il krill dei nuotatori così agili”.
Questo sforzo collaborativo tra i ricercatori della Brown University e dell’Universidad Nacional Autónoma de México cerca di svelare i misteri del nuoto metacronale, consentendo una comprensione più profonda di come il krill prosperi in ambienti marini complessi e realizzi massicce migrazioni verticali.
Replicando con precisione i movimenti delle gambe e le appendici che cambiano forma del krill, Pleobot consente misurazioni e confronti precisi che altrimenti sarebbero impossibili da ottenere utilizzando animali vivi.
La tecnica del nuoto metacronale
Caratterizzata dal dispiegamento sequenziale delle gambe che nuotano in un movimento ondulatorio da dietro in avanti, la tecnica di nuoto metacronale conferisce una notevole manovrabilità al krill. I ricercatori immaginano futuri sistemi a sciame dispiegabili in grado di mappare gli oceani della Terra, intraprendere missioni di ricerca e recupero su larga scala o esplorare gli oceani di corpi celesti come Europa, una delle lune di Giove.
“Questo studio segna la fase iniziale del nostro obiettivo di ricerca a lungo termine per sviluppare la prossima generazione di veicoli autonomi di rilevamento subacqueo”, stati Monica Martinez Wilhelmus, professore assistente di ingegneria alla Brown University. “La comprensione delle interazioni fluido-struttura a livello di appendice ci consente di prendere decisioni informate sui progetti futuri”.
I ricercatori hanno ottenuto il controllo attivo su due segmenti delle gambe di Pleobot, mentre le pinne biramose presentano un controllo passivo, rendendolo la prima piattaforma a replicare l’intricato movimento di apertura e chiusura di queste pinne.
Pleobot consiste principalmente di parti stampabili in 3D
Costruito dieci volte più grande del vero krill, Pleobot è costituito principalmente da parti stampabili in 3D, con il suo design reso disponibile gratuitamente ad altri team per un’ulteriore esplorazione del nuoto metacronale, non solo nel krill ma anche in organismi come le aragoste. Lo studio svela uno dei misteri che circondano il nuoto dei krill: il meccanismo con cui generano portanza per evitare di affondare mentre nuotano in avanti.
Attraverso i loro esperimenti con Pleobot, i ricercatori hanno identificato una regione di bassa pressione nella parte posteriore delle gambe che nuotano, contribuendo ad aumentare la forza di sollevamento durante la corsa di potenza delle gambe in movimento.
Basandosi su questo successo iniziale, i ricercatori intendono continuare a perfezionare e testare i progetti presentati nello studio. I loro sforzi in corso comportano l’incorporazione delle caratteristiche morfologiche dei gamberetti, come la flessibilità e le setole attorno alle appendici, nella piattaforma robotica.
Ad ogni passo in avanti, il team si sforza di svelare i segreti della natura, aprendo la strada allo sviluppo di veicoli subacquei autonomi avanzati e migliorando la nostra comprensione dell’esplorazione subacquea.
Archiviato in . Per saperne di più su Robotica e Scienza.